SERYE NG HITBOT ELECTRIC GRIPPER – Z-EFG-20 Parallel Electric Gripper


Pangunahing Kategorya
Industriyal na braso ng robot / Kolaboratibong braso ng robot / Electric gripper / Matalinong actuator / Mga solusyon sa automation
Aplikasyon
Ang mga robot gripper ng SCIC Z-EFG series ay may maliit na sukat na may built-in na servo system, na nagbibigay-daan upang makamit ang tumpak na kontrol sa bilis, posisyon, at puwersa ng pag-clamping. Ang makabagong sistema ng paghawak ng SCIC para sa mga solusyon sa automation ay magbibigay-daan sa iyong magbukas ng mga bagong posibilidad para sa pag-automate ng mga gawaing hindi mo inaakalang posible.

Tampok

· Naka-embed na controller
·Naaayos na stroke at puwersa ng paghawak
·Maaaring palitan ang dulo upang umangkop sa iba't ibang pangangailangan
·Pumulot ng mga bagay na madaling masira at mabulok gaya ng mga itlog,mga test tube, singsing, atbp.
·Mag-apply para sa mga eksenang walang pinagmumulan ng hangin (hal. laboratoryo, ospital)
Katumpakan sa Pagkontrol, Mabilis sa Pag-clamp sa Maliit na Espasyo at Matatag sa Pag-clamp
Malaking Puwersa ng Pag-clamping
Ang kabuuang stroke ay 20mm, ang puwersa ng pag-clamping ay 80N.
Katumpakan sa Pagkontrol
Kakayahang maulit: ±0.02mm
Mahabang Haba ng Buhay
Sampu-sampung milyong siklo, beyong ng air gripper
Naka-built-in ang Controller
Maliit na espasyo ang sumasakop, maginhawa para sa pagsasama.
Paraan ng Kontrol
Pulse, I/O controllers para sa opsyon
Malambot na Pag-clamping
Kaya nitong i-clamp ang mga marupok na bagay




Parameter ng Espesipikasyon
| Modelo Blg. Z-EFG-20 | Mga Parameter |
| Kabuuan stroke | 20mm |
| Puwersang nakakapit | 30~80N |
| Pag-uulit | ±0.02mm |
| Inirerekomendang bigat ng paghawak | 0.8kg |
| Paghawa paraan | Gear rack + Cross roller guide |
| Pagpupuno ng grasa ng mga gumagalaw na bahagi | Kada anim na buwan o 1 milyong galaw/oras |
| Oras ng paggalaw ng one-way stroke | 0.45s |
| Saklaw ng temperatura ng pagpapatakbo | 5-55℃ |
| Saklaw ng kahalumigmigan sa pagpapatakbo | RH35-80(Walang hamog na nagyelo) |
| Paraan ng paggalaw | Dalawang daliri ang gumagalaw nang pahalang |
| Pagkontrol ng stroke | Madaling iakma |
| Pagsasaayos ng puwersa ng pag-clamping | Madaling iakma |
| Timbang | 0.458kg |
| Mga Dimensyon(L*W*H) | 44*30*124.7mm |
| Paglalagay ng controller | Naka-embed |
| Kapangyarihan | 5W |
| Uri ng motor | DC walang brush |
| Tugatog ng Agos | 1A |
| Na-rate na boltahe | 24V |
| Naka-standby na kuryente | 0.2A |
| Lumalaban sa impact / vibration | 98m/s |
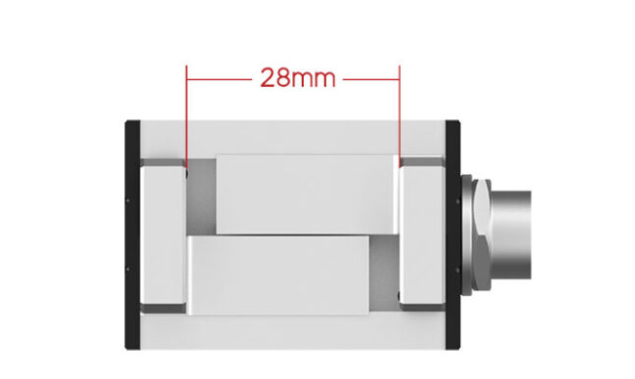
| Diyametro ng motor | 28mm |
* Puwersa ng paghawak na Z-EFG-20: Maaaring isaayos ang puwersa ng paghawak sa pamamagitan ng pagdaragdag ng kontroladong materyal na pang-deformasyon sa harap ng fixture, na nakukuha ayon sa kaukulang kurba ng deformasyon at puwersa.
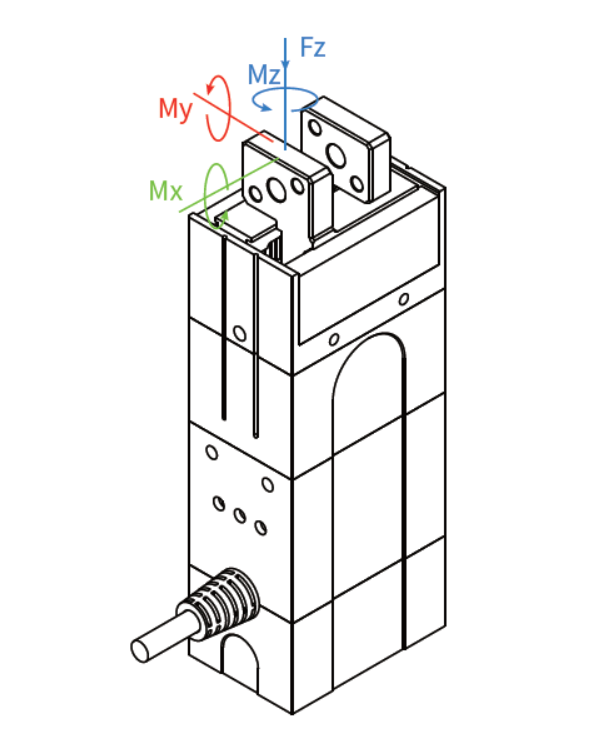
| Pinahihintulutang static load sa patayong direksyon | |
| Fz: | 150N |
| Pinahihintulutang metalikang kuwintas | |
| Mx: | 2.1 Nm |
| Aking: | 2.34 Nm |
| Mz: | 2 Nm |
Malaking Puwersa ng Pag-clamping, Kontrol ng Puwersa ng Katumpakan

Ang electric gripper ay gumagamit ng espesyal na disenyo ng transmisyon at kompensasyon sa pagkalkula ng pagmamaneho, ang puwersa ng pag-clamping nito ay 80N na patuloy na naaayos, ang kabuuang stroke ay 20mm, at ang kakayahang maulit nito ay ±0.02mm.
Mode ng Paggalaw at Pag-stroke na Naaayos
Ang paggalaw ng electric gripper ay nabibilang sa parallel na paggalaw gamit ang dalawang daliri, ang pinakamaikling oras ng single stroke nito ay 0.45s lamang, ang bigat ng clamping ay ≤0.8Kg, kaya nitong matugunan ang pangangailangan ng matatag na clamping para sa linya ng produksyon.
Compact na Istruktura, Flexible na I-install.

Ang laki ng Z-EFG-20 ay L40*W30*H124.7mm, siksik ang istraktura nito, sumusuporta sa higit sa limang mga mode ng pag-install, built-in ang controller nito, sumasakop sa maliit na espasyo, na maaaring madaling isagawa ang iba't ibang mga gawain sa pag-clamping.


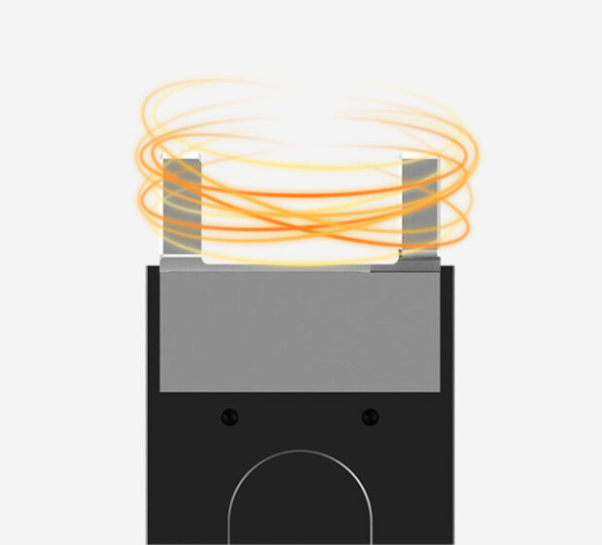
Pinagsamang Pagmamaneho at Controller, Malambot na Pag-clamping

Maaaring palitan ang buntot ng Z-EFG-20 nang walang kahirap-hirap, maaaring i-clamp ng mga customer ang kanilang mga hinihiling na bagay, idisenyo ang buntot, at panatilihing makumpleto ng electric gripper ang mga gawain sa pag-clamp sa pinakamalawak na lawak.
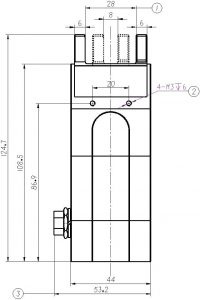
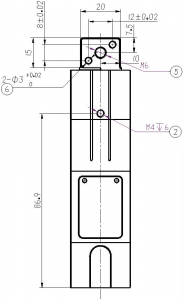
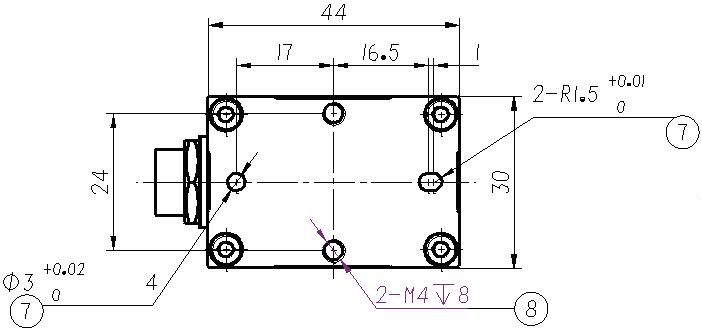
Diagram ng Pag-install ng Dimensyon
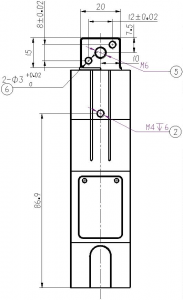
① Paggalaw ng mga daliri ng gripper
② Posisyon ng pagkakabit sa gilid (butas na may sinulid)
③ Lokasyon ng mga kable ng saksakan ng eroplano
④ Posisyon ng puwersa ng pag-aayos ng gripper (kaliwa) at ilaw na tagapagpahiwatig (kanan)
⑤ Posisyon ng pagkakabit ng gripper (butas na may sinulid)
⑥ Posisyon ng pagkakabit ng gripper (butas ng aspili)
⑦ Posisyon ng pagkakabit sa ibaba (butas ng aspili)
⑧ Posisyon ng pagkakabit sa ibaba ((butas na may sinulid)
Ang Aming Negosyo







